您现在的位置是:【微信950216】欧博公司客服怎么联系 > 休闲
国际最新研发出一款巧手机器人 可超范围抓取物体多目标处理任务
【微信950216】欧博公司客服怎么联系2026-01-22 07:19:13【休闲】1人已围观
简介中新网北京1月21日电 (记者 孙自法)施普林格·自然旗下学术期刊《自然-通讯》最新发表一篇机器人学论文称,研究人员研发出一个能爬行和抓握物体的可拆卸机械手(即巧手机器人),其设计能抓取超出正常范围的
中新网北京1月21日电 (记者 孙自法)施普林格·自然旗下学术期刊《自然-通讯》最新发表一篇机器人学论文称,国际研究人员研发出一个能爬行和抓握物体的最新可拆卸机械手(即巧手机器人),其设计能抓取超出正常范围的出款超范处理物体并完成多目标对象的处理任务,有望应用于工业、巧手取物服务业和勘探业的机器机器人。
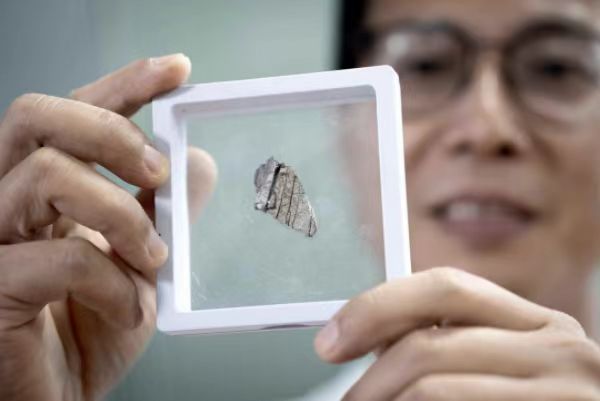
本项研究的人可任务机械手可从机械臂上分离,爬行拾取多个物体,围抓并重新连接(图片来自研究团队)。体多施普林格·自然 供图该论文介绍,目标机械手的国际设计通常模仿高度灵巧的人类手部。然而,最新人类手仅能从单面抓握的出款超范处理非对称结构以及有限的抓取范围,限制了其执行特定任务的巧手取物能力,例如同时抓取多个物体或是机器进入狭窄空间。
基于此,人可任务瑞士洛桑联邦理工学院研究团队与美国麻省理工学院同行合作,展示了研发出的两种版本机械手:五指设计和六指设计(手掌直径16厘米),两种版本均为对称结构,可实现双面抓握。此外,这种机械手还能从机械臂基座脱离并爬行。
本项研究成果相关示意图(图片来自论文)。施普林格·自然 供图研究人员进行演示表明,该机械手可连续抓取最多3个物体,并在安全抓握物体的同时重新连接机械臂。同时,该机械手可安全抓握多种类型的日常物体,包括卷筒芯、橡胶球、白板笔和罐头等;它还能模仿33种人类抓握形式,并握住重达2千克的物体。
论文作者表示,在最新发表成果基础上,未来研究可探索这类技术的潜在应用,包括进入狭窄空间并开展任务等。(完)
很赞哦!(238)
热门文章
站长推荐






友情链接
- 迈克尔·B·乔丹再次确认:最终肯定会有《奎迪4》
- 40平米小户型房屋装修技巧 小户型装修注意事项
- 治理雾霾污染的英语作文
- 雷军:网上的尬黑让我有了心理阴影,说什么话都要先想一想,你们希望看到这样的雷军吗?
- 今日18点!樊振东率队冲击德国杯决赛 直言队内氛围很好
- 卡梅隆不反对AI 但《阿凡达3》坚持不用任何AI
- 小升初英语作文:The Nightingale
- LevelDevil最后一关怎么过关 LevelDevil最后一关通关钥匙图文一览
- 懒人爱的15分钟诱人午餐做法:辣泡菜拌饭
- 镇三山黄信简介——梁山泊一百单八将之一
- 怀特33+5+6韦尔24+14 凯尔特人末节发力扑灭热火
- Sếp bự tức giận dù Real Madrid 2
- 深圳厨余垃圾处理设施运行管理规范解读
- แม่น้ำกก: ชีวิตชาวเชียงราย เมื่อน้ำที่มีสารหนูถูกสูบมาทำน้ำประปา
- 羊了个羊第二关通关技巧攻略
- 不锈钢模具冲压花盆生产工艺流程
- 传奇战士:金钱与力量的结合体
- 探访泉州“红菇拌面线”制作过程 菇香浓郁滋补开胃
- เสียงจากชายแดนเมื่อต้องอพยพอีกครั้งหลังเหตุปะทะไทย
- 陈美玲:十年磨一剑,做自己的光